Dans cet article, nous vous donnerons une brève introduction à la programmation hors ligne de robots et à la façon dont vous pouvez utiliser le logiciel Visual Components pour rationaliser la PHL.
Avantages clés :
- L’architecture ouverte de Visual Components 4.0 en fait une plate-forme très personnalisable et puissante pour développer des solutions PHL
- L’API de topologie virtuelle et l’outil d’apprentissage des courbes simplifient et accélèrent l’enseignement de la trajectoire du robot
- Solution rapide, simple et économique pour la programmation de robots et la planification de nouvelles cellules de travail
Logiciel de programmation hors ligne de robots : une opportunité pour les entreprises
Le logiciel de programmation hors ligne (PHL) a parcouru un long chemin au fil des ans. Ce qui était autrefois considéré comme une technologie trop coûteuse et complexe pour la plupart des fabricants est maintenant plus avancé, plus abordable et beaucoup plus facile à utiliser.
Le logiciel PHL offre un retour sur investissement significatif pour de nombreux types de projets d’automatisation, en économisant du temps, en améliorant la productivité et en aidant les fabricants à identifier les opportunités de réduction des coûts.
Dans cet article, nous vous donnerons une brève introduction à la programmation de robots et à la façon dont vous pouvez utiliser Visual Components pour rationaliser l’OLP. Nous discuterons de certaines des fonctionnalités clés qui rendent cela possible et vous montrerons un exemple de leur fonctionnement.
Présentation de la programmation hors ligne de robots
La programmation de robot est le processus de programmation d’un robot pour effectuer un ensemble de tâches. Pour les robots industriels, la programmation peut se faire « en ligne », c’est-à-dire dans un environnement de production, ou « hors ligne », c’est-à-dire en dehors d’un environnement de production. Deux des méthodes clés pour la programmation de robots sont l’enseignement du robot et la programmation hors ligne.
Dans la méthode d’enseignement, un Terminal de Programmation est utilisé pour déplacer manuellement un robot vers différentes positions et orientations à chaque étape de la tâche du robot. Les configurations de robot pertinentes sont enregistrées par le contrôleur de robot, et un programme de robot est écrit pour ordonner au robot de se déplacer à travers les postures enregistrées. (1)
La méthode PHL utilise des données 3D pour créer un modèle virtuel du robot et de la cellule de travail. Grâce à la simulation, il permet à l’utilisateur d’enseigner virtuellement le robot.
La PHL étant une approche informatique qui utilise des modèles numériques et une simulation avancée, elle est beaucoup plus rapide et précise que la programmation en ligne pour de nombreuses applications.
Certains produits logiciels utilisés pour la PHL, comme Visual Components, ont des fonctionnalités qui rendent également le processus PHL très simple.

Le logiciel PHL offre un retour sur investissement significatif pour de nombreux types de projets d'automatisation, en économisant du temps, en améliorant la productivité et en aidant les fabricants à identifier les opportunités de réduction des coûts.
Enseignement du robot avec Visual Components
Avec Visual Components Premium, vous pouvez créer des programmes qui définissent les actions et les routines à exécuter par un robot industriel.
Cela peut être fait en enseignant virtuellement les positions du robot ou en utilisant l’outil d’apprentissage des courbes pour générer des trajectoires. Vous utiliserez probablement une combinaison de ces méthodes pour développer votre programme robot.
Apprentissage des courbes
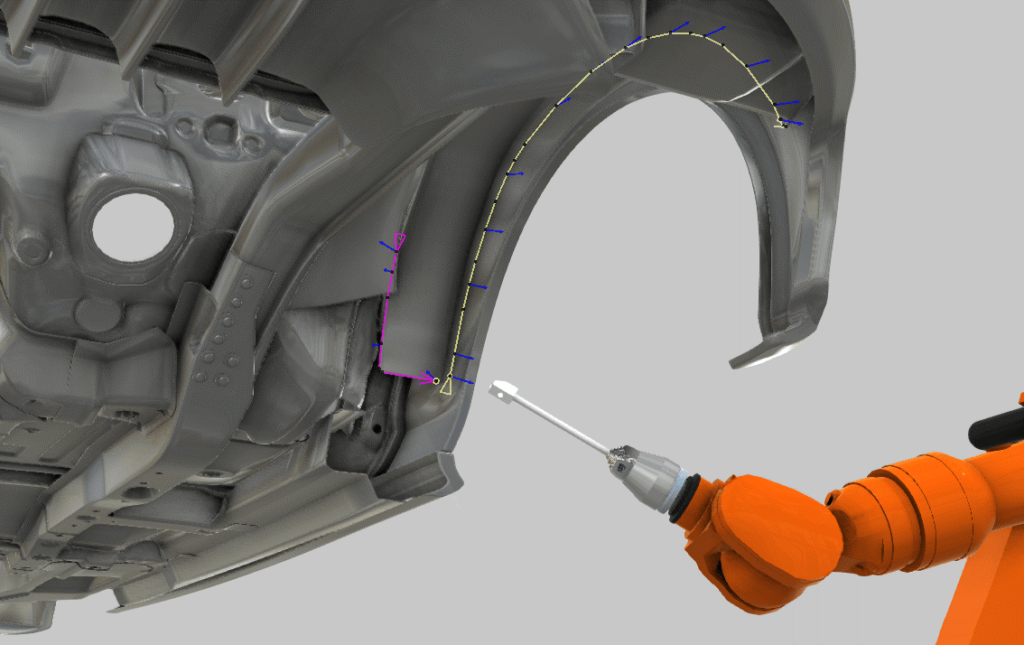
Une nouvelle fonctionnalité que nous avons introduite dans Visual Components 4.0 est l’outil d’apprentissage des courbes, qui simplifie grandement l’enseignement de la trajectoire du robot. Dans cette section, nous allons vous présenter l’outil d’apprentissage des courbes et comment vous pouvez l’utiliser pour enseigner à un robot un chemin de positions.
Une instruction « Path » dans Visual Components décrit une séquence de positions qu’un robot doit suivre pour effectuer un chemin donné. Selon l’application, comme l’ébavurage, le scellage ou le soudage à l’arc, un programme de robot peut avoir des dizaines voire des centaines de positions à définir. Comme vous pouvez l’imaginer, créer un programme de robot pour l’une de ces applications peut prendre beaucoup de temps, surtout si vous devez enseigner toutes les positions.
L’outil d’apprentissage des courbes simplifie cela en automatisant le processus d’apprentissage de la trajectoire du robot. Il analyse les géométries des objets, fait des prédictions de trajectoire et suggère des trajectoires de robot. Il génère ensuite automatiquement les instructions dans le code de votre programme de robot.
Topologie virtuelle
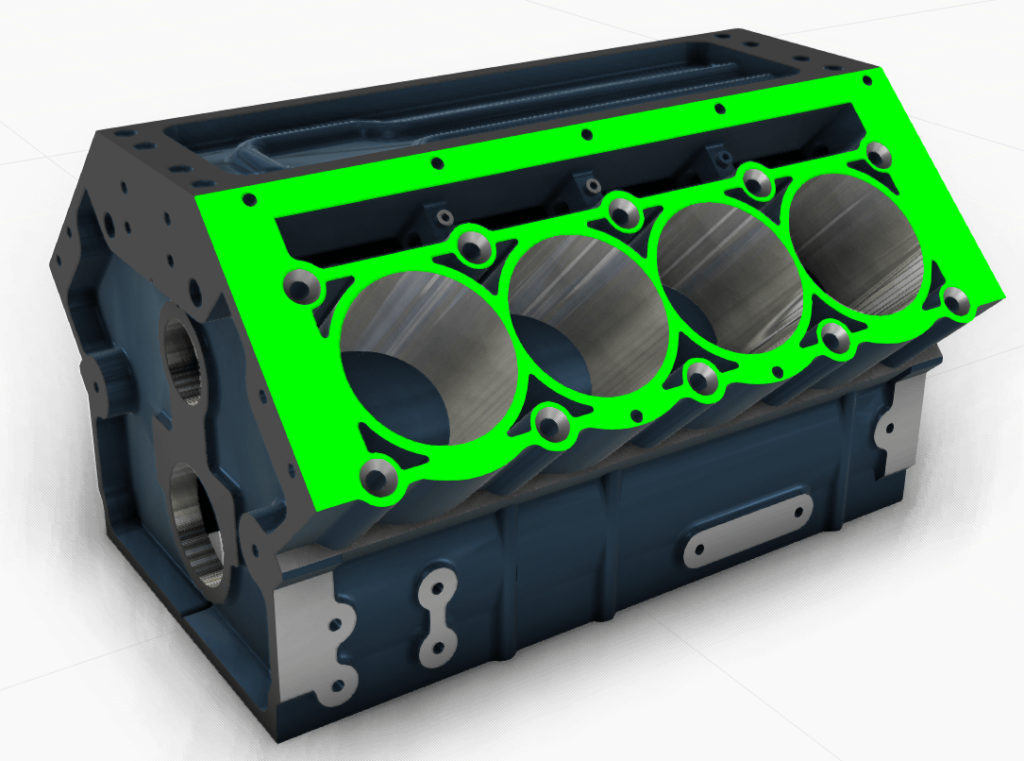
La clé est la topologie virtuelle, qui est une sorte de reconnaissance de fonctionnalité dans Visual Components 4.0.
Lorsqu’un modèle CAO est importé dans Visual Components, notre moteur de géométrie 3D analyse le modèle et fournit des données structurées des surfaces, des courbes et des boucles de courbe de la géométrie. L’outil d’apprentissage des courbes utilise ces données pour faire ses prédictions de trajectoire et suggérer des trajectoires de robot.
La fonction de topologie virtuelle est également accessible en tant que service via notre API de topologie et utilisée pour développer des outils personnalisés de planification et d’enseignement du chemin du robot.
Ceci est particulièrement utile pour les utilisateurs qui souhaitent créer leurs propres outils de génération de chemin pour les processus de fabrication personnalisés de leur organisation.
Logiciel Visual Components : idéal pour la programmation robotique industrielle
Visual Components Premium inclut des fonctionnalités et des capacités avancées pour PHL, ce qui en fait une solution rapide, simple et économique pour la programmation de robots et la planification de nouvelles cellules de travail.
Des fonctionnalités telles que l’API de topologie virtuelle et l’outil d’apprentissage des courbes aident à simplifier et à accélérer l’enseignement de la trajectoire du robot.
L’architecture ouverte de Visual Components 4.0 en fait une plate-forme très personnalisable et puissante sur laquelle développer des solutions PHL.
Si vous souhaitez voir un exemple de notre outil d’apprentissage des courbes en action, regardez cette vidéo :
La plate-forme Visual Components est utilisée pour alimenter les outils PHL utilisés dans de nombreux domaines de la fabrication. Découvrez les produits développés par nos partenaires PHL, Delfoi et Octopuz.
Si vous souhaitez savoir comment vous pouvez utiliser Visual Components pour concevoir et valider une cellule robotisée que vous envisagez, contactez-nous pour planifier une démonstration Web personnalisée.




