La programmation de robots industriels n’est pas toujours simple. En utilisant la boite à outils robotique simple du logiciel de simulation 3D Visual Components, vous pouvez planifier, concevoir, tester et simuler des cellules de travail de robots industriels sans avoir de connaissances en programmation ou en robotique.

Pourquoi utiliser la "robotique simple" pour la programmation de robots industriels ?
« Simple Robotics » est un ensemble de fonctionnalités incluses dans tous les éditions du logiciel de programmation de robots Visual Components 4.0.
En bref, ces fonctionnalités permettent aux utilisateurs d’enseigner virtuellement un robot et de valider la cellule de travail.
Aucune programmation requise, et aucune connaissance préalable de la robotique nécessaire.
Avec la boîte à outils de la robotique simple, il est facile de planifier, concevoir, tester et simuler des cellules de travail de robot pour une variété d’applications industrielles. Dans cet article, nous passerons en revue certaines des fonctionnalités clés de Simple Robotics et comment les utiliser.
Principales fonctionnalités de la boîte à outils Simple Robotics pour la programmation de robots industriels
La boîte à outils Simple Robotics comprend des fonctionnalités qui permettent aux utilisateurs d’enseigner intuitivement des tâches à un robot et de valider la conception de la cellule de travail du robot. Voici un bref aperçu des principales fonctionnalités.
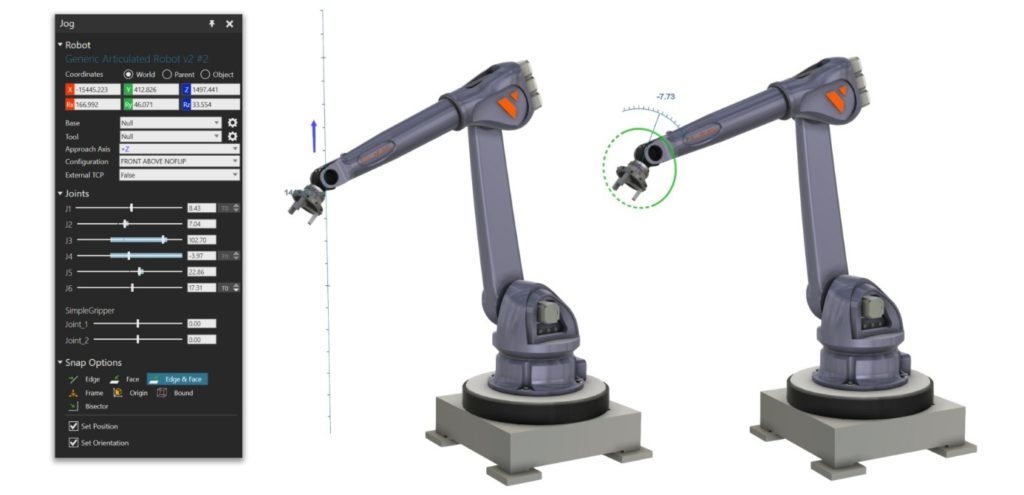
Le Jogging
Le jogging permet aux utilisateurs d’interagir avec un robot, ce qui signifie que le robot peut être déplacé, guidé et contrôlé dans le monde 3D. Cela vous permet de voir jusqu’où le robot peut atteindre et comment les articulations du robot se déplacent.
Les utilisateurs peuvent déplacer le robot en déplaçant des articulations individuelles ou en traduisant et en faisant pivoter le robot dans différents systèmes de coordonnées, y compris les coordonnées de l’outil du robot, les coordonnées mondiales et les systèmes de coordonnées des pièces.
L'analyse d'accessibilité
L’analyse d’accessibilité aide les utilisateurs à vérifier que le robot est capable d’atteindre et d’interagir avec des objets dans sa cellule de travail.
Il aide également à visualiser l’espace de la cellule de travail. Cela aide les utilisateurs à prendre des décisions de conception importantes, par exemple étendre la portée d’un robot, réorganiser l’équipement dans la cellule, ajouter des robots supplémentaires ou modifier la taille ou la position du robot.

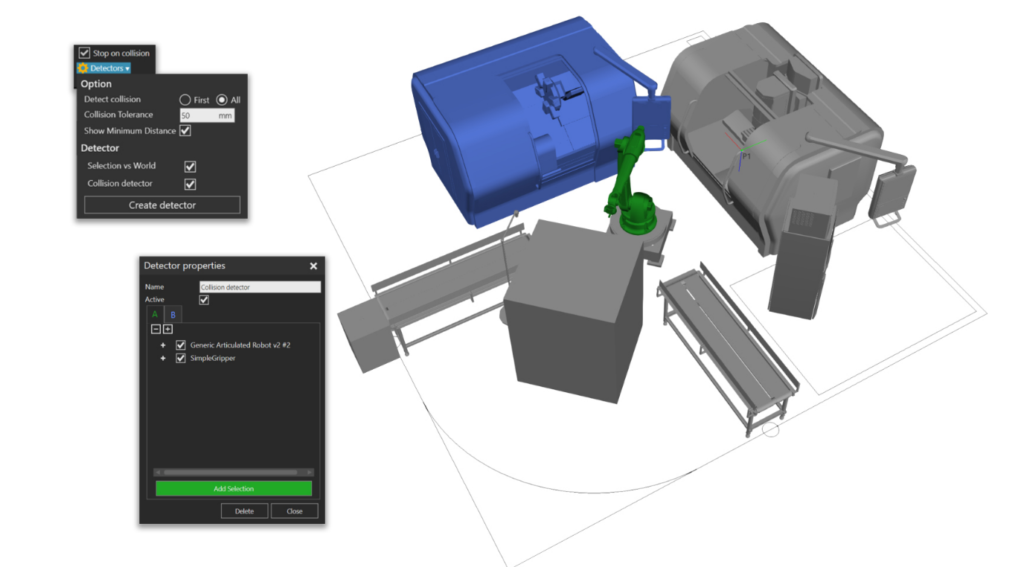
La détection de collission
La détection de collision permet aux utilisateurs de visualiser les collisions potentielles entre le robot et d’autres objets dans sa cellule de travail.
Elle fonctionne en simulant les trajectoires du robot et en informant les utilisateurs de l’emplacement et de la proximité des collisions détectées et des quasi-accidents.
Vous pouvez valider des zones de sécurité pour la cellule, l’espace de travail et l’outil d’un robot. De plus, vous pouvez identifier les dangers potentiels liés aux mouvements du robot en balayant la géométrie et en la comparant avec le chemin d’autres ressources telles que les travailleurs et les véhicules.
La détection de collision est une étape importante dans la vérification du programme du robot et une tâche généralement beaucoup plus sûre et rapide à effectuer hors ligne.
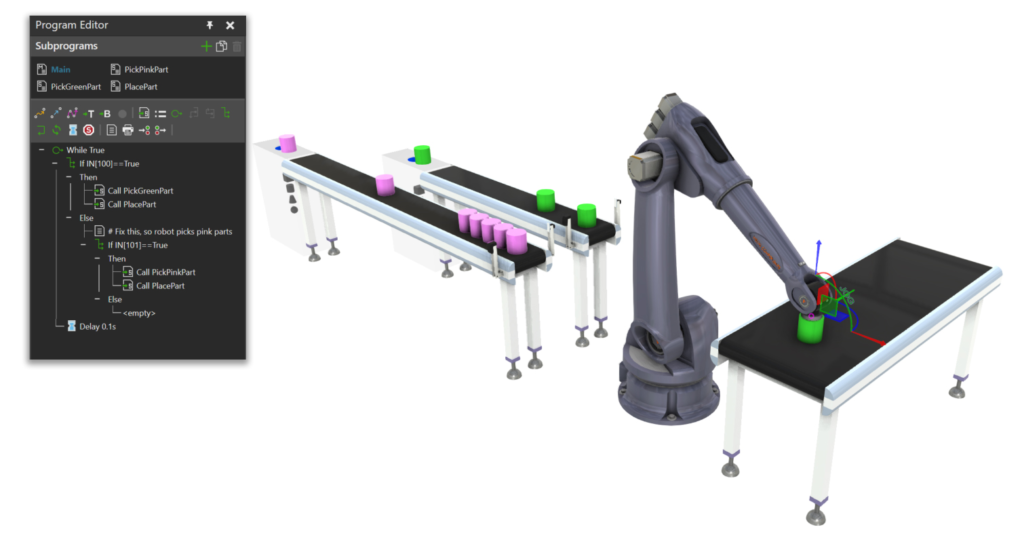
L'édition de programme
L’édition de programme permet aux utilisateurs de définir des séquences d’instructions pour un robot, puis de simuler ce programme.
Vous pouvez définir la logique du robot, telle que l’ordre des étapes, le type de mouvements, les signaux d’attente et de déclenchement et les sous-programmes.
Vous pouvez également tester les entrées et les sorties, optimiser la logique et l’exécution des tâches, synchroniser les mouvements du robot et valider les trajectoires de mouvement.

Le flux de contrôle
Le flux de contrôle vous permet d’utiliser des instructions IF conditionnelles, des boucles et des variables dans un programme de robot.
- Une instruction SI définit une condition d’exécution de l’une des deux portées, THEN et ELSE. La condition peut faire référence aux propriétés et aux entrées du robot ainsi qu’aux variables locales de la séquence de l’instruction. Par exemple, vous pouvez rapidement apprendre à un robot à exécuter une séquence d’instructions différente en fonction des entrées des capteurs et des compteurs pour la palettisation des pièces.
-
- Une instruction WHILE définit une condition d’exécution d’une portée d’instructions dans une boucle. Tant que la condition est vraie, la boucle se répète jusqu’à ce que la condition soit fausse. Par exemple, vous pouvez faire faire quelque chose à un robot jusqu’à ce qu’une demande vienne d’un autre client.
Réalisez simplement la programmation de robots industriels avec Visual Components
Dans cet article, nous vous avons présenté brièvement la boîte à outils Simple Robotics dans Visual Components 4.0. Avec la boîte à outils Simple Robotics, les utilisateurs peuvent enseigner virtuellement des robots et valider la conception de la cellule de travail. La simulation du flux de travail génère des statistiques de production, telles que les temps de cycle, les taux de production et les goulots d’étranglement des processus ; donner aux concepteurs et aux planificateurs des informations précieuses qu’ils peuvent utiliser pour optimiser la conception de la cellule robotisée.
Le logiciel de simulation de production 3D Visual Components aide les fabricants et les intégrateurs de systèmes à concevoir de meilleures cellules robotisées. Avec plus de 1 200 modèles de robots de plus de 30 grands fabricants de robots disponibles dans notre catalogue électronique public, les utilisateurs de Visual Components ont accès à une bibliothèque complète et en constante évolution de composants prêts à l’emploi.
Si vous souhaitez savoir comment utiliser Visual Components pour simuler vos applications robotiques, contactez-nous pour planifier une démonstration Web gratuite et personnalisée.




